
MPU6050 with Raspberry Pi
Published
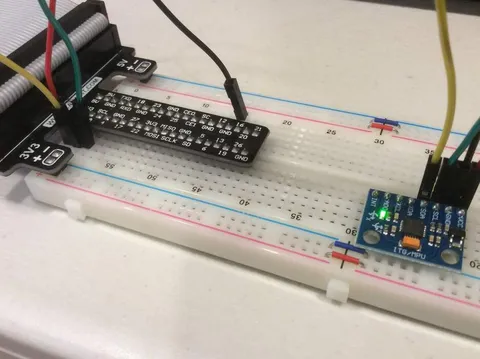
Measuring acceleration and rotation with a Raspberry Pi and MPU6050 IMU
About MPU6050
The MPU6050 consists of a 3-axis gyroscope and 3-axis accelerometer. It also contains a DMP (digital motion processor) to perform complex calculations, which frees up the controller to do other things.
The MPU6050 has a 16-bit ADC (analog to digital) chip. Because of this, it can receive motion in all three planes.
The MPU6050 uses the I2C interface.
MPU6050 Pinout
| Pin | Description |
|---|---|
VCC | 3-5 V supply voltage |
GND | Ground connection |
SCL | I2C clock connection |
SDA | I2C data connection |
XDA | See below |
XCL | |
AD0 | Address pin |
INT | Interrupt pin |
XDA and XCL stand for auxiliary data and auxiliary clock, respectively. These pins can be used for interfacing with other I2C devices.
The address pin can be used to change the address of the MPU6050. (default is 0x68)
The interrupt pin is used to indicate that data is available for the microcontroller to read.
MPU6050 Registers
| Address | Name in code | Purpose |
|---|---|---|
0x6B | PWR_MGMT_1 | Writing to power management register |
0x19 | SMPLRT_DIV | Writing to sample rate register |
0x1A | CONFIG | Writing to configuration register |
0x1B | GYRO_CONFIG | Writing to gyro configuration register |
0x38 | INT_ENABLE | Writing to interrupt enable register |
0x3B | ACCEL_X | Reading X Accelerometer raw data |
0x3D | ACCEL_Y | Reading Y Accelerometer raw data |
0x3F | ACCEL_Z | Reading Z Accelerometer raw data |
0x43 | GYRO_X | Reading X Gyro raw data |
0x45 | GYRO_Y | Reading Y Gyro raw data |
0x47 | GYRO_Z | Reading Z Gyro raw data |
Connections to Raspberry Pi
| MPU6050 pin | Connects to RPi pin |
|---|---|
VCC | 3.3 V power |
GND | GND |
SCL | GPIO 3 (SCL) |
SDA | GPIO 2 (SDA) |
Code
I2C needs to be enabled on your Raspberry Pi before running this code. See ADS1115 with Raspberry Pi for details.
This code prints the acceleration and gyro values on each of the three axes.
from time import time, sleep
import smbus
bus = smbus.SMBus(1)
previous, current, elapsed = 0, 0, 0
x, y, z = 0, 0, 0
# MPU6050 registers
PWR_MGMT_1 = 0x6B
SMPLRT_DIV = 0x19
CONFIG = 0x1A
GYRO_CONFIG = 0x1B
INT_ENABLE = 0x38
ACCEL_X = 0x3B
ACCEL_Y = 0x3D
ACCEL_Z = 0x3F
GYRO_X = 0x43
GYRO_Y = 0x45
GYRO_Z = 0x47
device_address = 0x68
def init():
# Write to sample rate register
bus.write_byte_data(device_address, SMPLRT_DIV, 7)
# Write to power management register
bus.write_byte_data(device_address, PWR_MGMT_1, 1)
# Write to Configuration register
bus.write_byte_data(device_address, CONFIG, 0)
# Write to Gyro configuration register
bus.write_byte_data(device_address, GYRO_CONFIG, 24)
# Write to interrupt enable register
bus.write_byte_data(device_address, INT_ENABLE, 1)
def read_data(addr):
# Get elapsed time for calculating gyro angle
global current
previous = current
current = time()
elapsed = current - previous
# Accel and Gyro value are 16-bit
high = bus.read_byte_data(device_address, addr)
low = bus.read_byte_data(device_address, addr + 1)
# Concatenate higher and lower value
value = (high << 8) | low
# Get signed value from sensor
if value > 32768: value -= 65536
return value
def scale_gyro(val):
return val / 131.0
def scale_accel(val):
return val / 16384.0
init()
while True:
try:
x_accel = scale_accel(read_data(ACCEL_X))
y_accel = scale_accel(read_data(ACCEL_Y))
z_accel = scale_accel(read_data(ACCEL_Z))
x_gyro = scale_accel(read_data(GYRO_X))
y_gyro = scale_accel(read_data(GYRO_Y))
z_gyro = scale_accel(read_data(GYRO_Z))
print("Accel X: %.3f Accel Y: %.3f Accel Z: %.3f Gyro X: %.3f Gyro Y: %.3f Gyro Z: %.3f" %
(x_accel, y_accel, z_accel, x_gyro, y_gyro, z_gyro))
sleep(0.2)
except KeyboardInterrupt:
print("Stopped")
breakOutput
Accel X: -0.013 Accel Y: 0.012 Accel Z: 0.922 Gyro X: 0.000 Gyro Y: -0.000 Gyro Z: -0.000 Accel X: -0.012 Accel Y: 0.011 Accel Z: 0.939 Gyro X: 0.000 Gyro Y: -0.000 Gyro Z: -0.000 Accel X: -0.016 Accel Y: 0.009 Accel Z: 0.931 Gyro X: 0.000 Gyro Y: -0.000 Gyro Z: -0.000 Accel X: -0.017 Accel Y: 0.012 Accel Z: 0.933 Gyro X: 0.000 Gyro Y: -0.000 Gyro Z: -0.000 Accel X: -0.017 Accel Y: 0.014 Accel Z: 0.941 Gyro X: 0.000 Gyro Y: -0.000 Gyro Z: -0.000 Accel X: -0.015 Accel Y: 0.016 Accel Z: 0.922 Gyro X: 0.000 Gyro Y: -0.000 Gyro Z: -0.000 Accel X: -0.017 Accel Y: 0.004 Accel Z: 0.934 Gyro X: 0.000 Gyro Y: -0.000 Gyro Z: -0.000 Accel X: -0.018 Accel Y: 0.008 Accel Z: 0.930 Gyro X: 0.000 Gyro Y: -0.000 Gyro Z: -0.000 Accel X: -0.022 Accel Y: 0.007 Accel Z: 0.932 Gyro X: 0.000 Gyro Y: -0.000 Gyro Z: -0.000 Stopped
Getting Rotation from Degrees per Second
The gyroscope measures degrees per second (how many degrees it has rotated in a second, or speed of rotation). We can plug in deg/sec for rate and seconds for time, so (degrees per second) * (seconds) equals degrees in rotation.
Below is the code showing this:
from time import time, sleep
import smbus
bus = smbus.SMBus(1)
previous, current, elapsed = 0, 0, 0
x, y, z = 0, 0, 0
# MPU6050 registers
PWR_MGMT_1 = 0x6B
SMPLRT_DIV = 0x19
CONFIG = 0x1A
GYRO_CONFIG = 0x1B
INT_ENABLE = 0x38
ACCEL_X = 0x3B
ACCEL_Y = 0x3D
ACCEL_Z = 0x3F
GYRO_X = 0x43
GYRO_Y = 0x45
GYRO_Z = 0x47
device_address = 0x68 # MPU6050 address
def init():
# Write to sample rate register
bus.write_byte_data(device_address, SMPLRT_DIV, 7)
# Write to power management register
bus.write_byte_data(device_address, PWR_MGMT_1, 1)
# Write to Configuration register
bus.write_byte_data(device_address, CONFIG, 0)
# Write to Gyro configuration register
bus.write_byte_data(device_address, GYRO_CONFIG, 24)
# Write to interrupt enable register
bus.write_byte_data(device_address, INT_ENABLE, 1)
def read_data(addr):
# Get elapsed time for calculating gyro angle
global current, elapsed
previous = current
current = time()
elapsed = current - previous
# Accel and Gyro value are 16-bit
high = bus.read_byte_data(device_address, addr)
low = bus.read_byte_data(device_address, addr + 1)
# Concatenate higher and lower value
value = (high << 8) | low
# Get signed value from sensor
if value > 32768: value -= 65536
return value
def scale_gyro(val):
return val / 131.0
def scale_accel(val):
return val / 16384.0
def get_rotation():
x_ang = scale_gyro(read_data(GYRO_X)) # Read gyro data (degrees per second)
y_ang = scale_gyro(read_data(GYRO_Y))
z_ang = scale_gyro(read_data(GYRO_Z))
global x, y, z
x += round(x_ang * elapsed * 1000) # Degrees/second multiplied by seconds = degrees
y += round(y_ang * elapsed * 1000) # Round values to prevent drift
z += round(z_ang * elapsed * 1000)
init()
while True:
try:
get_rotation()
print("X: %d Y: %d Z: %d" % (x, y, z))
sleep(0.2)
except KeyboardInterrupt:
print("Stopped")
breakOutput
X: 19 Y: 0 Z: -5 X: 27 Y: -1 Z: -5 X: 34 Y: -4 Z: -4 X: 40 Y: -6 Z: -3 X: 46 Y: -7 Z: -4 X: 53 Y: -7 Z: -4 X: 60 Y: -6 Z: -5 X: 50 Y: -6 Z: -6 X: 40 Y: -6 Z: -7 X: 31 Y: -2 Z: -9 X: 18 Y: -3 Z: -7